

來源:特種無人機創新應用與關鍵技術發展研究[J].中國工程科學,2025,27(2):62-72.
特種無人機指為滿足軍事國防、應急救援、特種工業等領域的特殊任務需求,專門設計、改裝或配備特殊設備的專用無人機。特種無人機具有超越普通無人機的高機動、強適應與集成任務能力,發展呈現出顯著的迭代升級態勢。促進特種無人機技術與裝備的高質量發展,對更好服務國防建設和社會經濟發展具有重要意義。
中國工程院項昌樂院士研究團隊在中國工程院院刊《中國工程科學》2025年第2期發表《特種無人機創新應用與關鍵技術發展研究》一文。文章從特種無人機裝備的傳統構型與創新構型兩個維度出發,深入剖析了國內外特種無人機技術的研究現狀與發展趨勢,辨識了特種無人機在軍事國防、應急救援、特種工業等領域中的典型任務能力需求及面臨的挑戰,進一步梳理了特種無人機技術體系,涵蓋特種平臺、智能控制、指控保障3個核心方向以及細分的技術類型。從發展布局統籌、未來研究方向兩個層面提出了我國特種無人機技術與裝備發展建議,以推進特種無人機裝備深度融入并有力支撐國防現代化建設、經濟社會高質量發展的戰略目標。

近年來,無人機作為無人作戰系統的關鍵組成部分,在一些局部對抗中發揮了巨大作用,已成為各國軍隊建設的重要作戰力量。實戰應用也極大地推動了無人機科技的快速發展與廣泛應用。以無人機應用為核心的低空經濟,作為加快發展新質生產力的一項具體任務,在2024年首次被寫入政府工作。根據中國民用航空局的預測,到2035年,我國低空經濟的市場規模將達到3.5萬億元。
當前,無人機形式多樣,按照用途分為軍用無人機、警用無人機、消防無人機、工業無人機、商用無人機、消費無人機等,按照飛行高度分為超低空無人機、低空無人機、中空無人機、高空無人機和超高空無人機等。為滿足軍事國防、應急救援、特種工業等特殊領域需求,專門設計、改裝或配備特殊設備的一類專用無人機可稱為特種無人機,是無人機裝備體系的重要發展方向之一,在國家建設與國防安全等方面肩負著重要使命。特種無人機一般具備優異的高機動、強適應或集成任務能力。無人機關鍵技術研究較為深入,以自主定位、航跡規劃、長航時應用、起飛方式、信息安全、低空交通管理、集群與對抗等為代表,但有關特種無人機的發展應用與關鍵技術等仍待系統梳理。
本文聚焦軍事國防、應急救援、特種工業三個代表領域的發展應用需求,從裝備研究現狀、應用發展、技術體系三個層面總結分析特種無人機技術發展現狀與趨勢;提出亟待攻克的關鍵技術和重點發展方向,旨在推動特種無人機裝備在國防建設與經濟社會發展方面發揮積極作用。
在軍事國防、應急救援和特種工業等關鍵領域,特種無人機呈現出顯著的迭代升級態勢。固定翼、旋翼與復合翼等傳統構型的無人機裝備不斷升級(見表1)。近年來,面對日益復雜的任務挑戰和嚴苛惡劣的環境需求,各國積極投身于變構、跨域和組合式新型無人機技術的深入研究,持續提升特種無人機的機動能力與適應能力,拓展其執行任務的樣式與邊界,確保在極端天氣條件下、廣闊海洋環境中、地下空間等受限場景里,均能夠實現穩定、持續、安全、高效地執行任務。
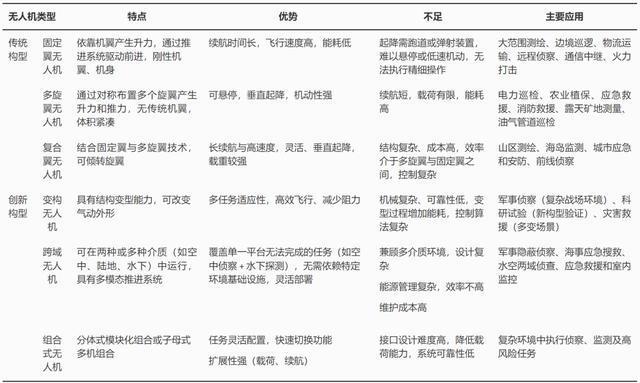
固定翼無人機因其結構簡單、飛行距離長及能耗低而廣泛應用于對敵打擊、毀傷評估、偵察監視、搜索救援及地形勘測等任務。在各國戰略規劃或專門機構的指導下,固定翼無人機朝著多功能、多層次、全方位方向發展。例如,美國空軍“合作式作戰無人機”項目研發的“塔納托斯”隱身作戰無人機,能在高速、高機動性戰斗環境中執行攻擊任務,具備獨立作戰和空對空能力;MQ-9“死神”察打一體無人機則能夠快速完成發現、確認、發射、摧毀等多項任務。大多數國家已裝備單體無人機,但為了提升無人機在執行任務中的整體能力,研究趨勢正朝向體系智能化、協同緊密化及平臺低成本化發展。例如,美國的“進化”系列無人機和“開局”系列無人機分別構成了一個“系統簇”,在同一作戰域內由指揮官進行統一指揮,具有一體化作戰能力。
我國無人機的發展起步較晚,自21世紀以來才呈現出快速發展的趨勢。自主研發的“刀鋒”“WJ-600”“翼龍”“夜鷹”“CH-3”等型號逐漸躋身國際領先行列,并朝著多任務和多功能方向發展。以“翼龍”無人機為例,其具備察打一體化、洲際飛行及跨域作戰能力,且在應急救援方面表現突出。2024年超強臺風“摩羯”登陸海南,“翼龍”-2H無人機迅速前往執行應急通信保障及災情偵察任務,成功搭載三大運營商公網基站,累計覆蓋面積約1000 km2,并實時向省航空應急救援指揮平臺回傳災區畫面,保障了地面救援人員的通信需求。此外,我國自主研發的“彩虹”系列無人機也已實現大規模出口,進一步推動了我國無人機產業的國際化進程。
旋翼無人機包括多旋翼無人機與無人直升機。多旋翼無人機機動性強、結構緊湊、可靠性高、維護成本低,主要承擔戰場偵察、航空搜救、災害救援和醫療救援等任務。早期研發源于對垂直起降飛行器的需求,以偵察為主執行單一任務。隨著輕型復合材料、衛星定位系統和傳感器技術的發展,多旋翼無人機迎來爆發期,向一體化、輕量化、集群化、智能化方向發展,多機協同作業可高效完成任務,使單機具備多任務執行能力,廣泛應用于各領域。例如,美國的“速眼”背包式四旋翼無人機,用于近程偵察,使用者能夠在1 min內完成從背包取出無人機然后釋放并發射的全過程;EVO II類型多旋翼無人機用于情報、監視與偵察,并投放小型彈藥有效載荷,在局部對抗中大放異彩;以色列無人機公司開發的無人飛行平臺,已經具備了初步的載人能力,可用于特定區域的滅火救援任務,能夠承載大重量的滅火裝備,并在關鍵時刻救助災民,降低受災人員的生命、財產損失。
國內多旋翼無人機的發展也經歷了從單機向集群協同,從單一任務向多任務的轉變。各種無人機向著多功能、多任務方向快速發展,實現多機協同自主探索決策 。如由中國兵器工業集團有限公司研發的“金雕”CR500無人機,最多能掛載8枚反坦克導彈,同時也能在空中持續監視,為后續無人機提供情報;LT150-M無人機可以進行震后測繪,并為重建后的地形地貌和建設項目進行了低空航攝工作;“雙尾蝎”應急通信型無人機可在震后救災現場執行應急通信保障任務。
復合翼無人機將固定翼和多旋翼無人機的優點相結合,具備飛行時間長、前飛速度快、航程遠的特點,同時擁有垂直起降、定點起降和懸停的能力,對于起飛的場地沒有依賴,能夠在惡劣環境中快速起降,因此復合翼無人機成為當今世界研究的熱點。美國開展了一系列的研究和驗證包括未來垂直起降飛行器(FVL)項目、垂直起降試驗飛機(VXP)項目等,在這些項目的帶動下,產生了V-22 艦載無人機“鷹眼”“幽靈雨燕”傾轉涵道式無人機、XV-24“雷擊”無人機等一系列復合翼無人機,能夠執行偵察、運輸、火力打擊等任務。為追求更高的飛行速度、更長的續航時間和更強的任務載荷能力,近幾年加快了分布式電推進復合翼無人機的發展,如空中客車公司的E-Airbus、美國航空航天局的 X-57和N3-X等分布式電推進復合翼無人機,憑借更快的響應速度和遠程能力,有效提升了察打一體、支援保障、通信互聯等能力。
國內復合翼無人機的迅速發展與全球的技術進步相輔相成,現已躋身世界第一梯隊。這類無人機在實際應用中展現出廣泛的適用性。例如,中國航空工業集團公司成都飛機設計研究所研制的VD200無人機,專門執行復雜地形的飛行任務,其攜帶的載荷能夠實現對重點目標的連續監測,并能夠在南海開展實際作戰。此外,翔鴻科技有限公司研發的“驚鴻”3400具備長續航作業能力,能夠精準鎖定目標并進行自動跟蹤,廣泛應用于偵察、巡檢和測繪等任務。延邊州森林消防支隊利用“遠度ZT-3VS”復合翼無人機進行森林火情監測,可以實現實時畫面回傳和應急通信保障,為應急救援任務提供了強有力的信息支持,顯著提升了救援效能。
變構無人機具備自適應調整外形結構的能力,可在執行飛行任務時優化氣動性能和操控特性。其核心優勢在于靈活性和多任務適應能力,可在不同環境和任務需求下調整自身形態以實現最佳飛行性能。與傳統飛行器相比,變構無人機可以根據任務切換來改變無人機參數并進行控制,使得其在偵察、救援、運輸、軍事行動等特種領域表現出色。蘇黎世聯邦理工學院和蘇黎世大學在2021年聯合研發了一種具備多種變形模式的無人機,其構型能夠在飛行過程中動態改變結構形態,包括X形、H形、O形和T形,以適應狹窄空間的探索、復雜地形中的偵察和搜救等任務,充分展示了多形態變構無人機的靈活性和多任務適應能力。亞利桑那州立大學的研究團隊在2022年開發了SoBAR無人機。該無人機具有高彈性的充氣式變構能力,能夠在飛行中承受撞擊,并通過其特殊設計的抓手裝置實現在樹枝等表面棲息。該構型在墜毀風險較高的救援任務和軍事偵察任務中,可有效避免碰撞損壞,提高無人機的任務生存能力。
跨域無人機是一種具備在不同介質環境中自由切換的無人機類型,具有極高的靈活性和多任務適應能力。陸空兩棲無人機和海空兩棲無人機是跨域無人機的兩大主要類別。
陸空兩棲無人機能夠在陸地和空中自由切換,適用于應急救援、戰場偵察等任務,按地面行駛機構可分為輪式、履帶式、球籠外殼陸空兩棲無人機。輪式陸空兩棲無人機包括FCSTAR、TABV、猛獅等,一般在平坦或稍復雜的地形上表現較好,適用于偵察、救援、農業、探索等任務。由于輪式結構的簡單性和高效性,它們通常在需要較快速度和較長續航能力的任務中使用。球體外殼和籠體外殼的無人機包括Drivocopter、HyTAQ等,通常適用于復雜環境中的任務,尤其是狹窄、受限的復雜約束環境。這類無人機為抵御碰撞進行了專門設計,保證內部設備的安全。籠體外殼提供了更高的抗碰撞性能,適合搜索救援及在災害環境中操作,而球體外殼則側重于復雜環境下的感知和識別,能夠在崎嶇地形或封閉空間中靈活作業。履帶式兩棲機器人包括Pegasus Mini、B-Unstoppable、北京理工大學研發的陸空兩棲機器人等,通常適用于崎嶇或不平整的地形,如泥濘、雪地、沙地等;此類機器人因其強大的越障能力在非結構化地形中通過性出色,特別適合軍事偵察、應急救援和室內監控等任務。
海空兩棲無人機可在水面和空中切換,廣泛應用于海事搜救、環境監測和跨域偵查等任務。上海交通大學海洋學院哪吒實驗室團隊研制的“哪吒-F”海空兩棲航行器采用可折疊機臂設計和活塞式浮力調節系統,使其能夠在空中和水下環境中自如切換。在空中任務中,它表現為四旋翼無人機;而在水下任務中,則折疊成流線型浮標以減小水下阻力。該無人機具備空中巡航、水下定深和自主返航回收等功能,在海事應急搜救、水空兩域偵查和環境監測等領域展示了卓越能力。
近年來,分體式、子母式等組合式無人機成為無人機集群技術的重要發展方向。分體式通過模塊化設計,可根據任務需求靈活組合不同功能模塊。北京理工大學在2022年發布全球首款載人級分體式飛行汽車工程樣機,采用了自主垂直起降飛行器、智能操控座艙和自動駕駛底盤三個獨立模塊的分體式構型,是面向載人、載物的立體運載系統;具備飛行汽車駕駛人機交互操作系統,通過智能感知傳感器引導座艙分別與底盤或飛行器對接,實現地面行駛、空中飛行模式切換。這種分體式組合重構的方案,可實現人員、貨物空地轉運的無縫銜接,具備更大的靈活性,可切換陸空不同行駛模式。南京航空航天大學于2023年推出了一種基于楓樹種子設計的分體式無人機,該無人機能夠在飛行過程中分裂成多個自主單元,不僅可作為一個整體執行長距離任務,還可以在任務過程中分裂成多架小型無人機,各自執行不同任務。分體式無人機提高了無人機的適應性、任務執行效率和維護便捷性,尤其適合在復雜環境中執行偵察、監測等任務。
子母式無人機系統由一個母機和多個子機組成,母機負責長距離飛行和數據傳輸,而子機則執行具體任務,如偵察和監測。這樣的結構使其能夠在軍事、物流等多種任務需求中靈活應對復雜環境。以美國國防高級研究計劃局(DARPA)開發的X-61A無人機平臺為例,X-61A作為子機可配合母機執行如偵察和打擊等多種任務。X-61A通過子母機之間的高效協同,實現在不進入敵方防空區域的情況下完成任務。母機提供高空的情報偵察支持,子機則在低空執行具體的戰術任務,完成后由母機回收,該設計顯著提升了無人機在軍事任務中的生存能力和任務成功率,拓展了高風險軍事行動戰術能力。
與傳統無人機的單一功能模式不同,特種無人機系統將展現出顯著的復合任務執行能力,其戰術應用將突破傳統偵察監視、電子干擾、通信中繼及火力打擊等獨立作戰模式。基于分布式任務操作系統,集群控制多架特種無人機形成強魯棒、可重構、高機動的協同作戰網絡,實時執行戰場態勢感知、電磁頻譜監測與火力協同等復合任務。從而提高作戰效率和打擊精度,并且降低指揮控制人員的作戰風險。蘇萊曼尼刺殺行動中部署的MQ-9“死神”無人機,集成合成孔徑雷達、激光制導武器等一系列模塊化任務載荷,具備在復雜電磁環境下實現對地面目標的精確打擊能力。
未來特種無人機作戰系統的核心趨勢將向“智能主導、集群協同、全域覆蓋”方向延伸。實現從高價值目標識別到打擊的全鏈條分布式自主決策。結合“忠誠僚機”概念,拓展協同突防和分散打擊能力。特種無人機將從戰術支援裝備升級為戰略威懾平臺,重塑現代戰爭形態。
無人機預警系統作為信息化戰爭體系中的關鍵性戰術節點,其作戰效能已突破傳統偵察裝備的單一功能定位。特種無人機將作為預警系統的重要補充,為該系統搭建多頻譜異構傳感網絡,實施全天候持續性空中監測任務,有效填補雷達探測網與衛星監控體系間的戰術空隙。在聯合作戰框架下,該系統的戰術數據鏈可實現與預警無人機、地面雷達站、電子戰單元的多源情報融合,此外,具備跨域能力的特種無人機為海、陸、空、天全域預警覆蓋提供媒介,有效開拓三維立體化戰場,感知網絡深度廣度。
多維度信息整合機制提升了態勢感知精度,通過輔助決策模塊對戰場數據進行多層次分析處理,實現指揮控制增強。為戰術指揮中樞提供基于貝葉斯推理的威脅評估模型和蒙特卡洛模擬的作戰方案優化建議。在觀察 ? 調整 ? 決策 ? 行動(OODA)循環機制中,特種無人機可填補通信組網空缺,憑借自身自適應跳頻通信中繼能力與低可觀測外形,有效保證系統通信的可用性。提升動態響應機制達到秒級實時響應能力,縮短“傳感器到射手”的殺傷鏈閉環周期,確保戰場態勢信息在指控網絡中的低時延、高保真傳輸,從而為指揮決策提供具備實時性和預測性的數據支撐。
戰場運輸補給無人機配備導航與定位系統,突破地形和交通限制,迅速響應補給需求,確保補給物資準確快速送達。美軍部署的TRV-150C戰術補給無人機能夠以近70 mi/h(1 mi≈1.61 km)的速度,攜帶150 lb(1 lb=0.454 kg)的有效戰術載荷,補給遠至44 mi的戰場前線;K-MAX無人直升機具備全球定位系統(GPS)定向自主飛行或遙控飛行能力,每次可吊裝運送物資2 t。
隨著智能化戰爭形態的發展,特種無人機系統正推動戰場后勤保障模式發生革命性變革。相較于傳統無人機,此類裝備集成了多模復合導航系統,突破傳統無人機對預設航線的依賴,具備全域、全地形自主路徑規劃能力,顯著壓縮緊急補給響應時間和提升戰場隱蔽生存能力;所配備的抗干擾數據鏈系統,在GPS拒止環境下仍可通過自組網中繼維持導航精度。相較同期傳統運輸直升機,常因戰場威脅導致的任務中止,特種無人機任務完成率顯著提升,將成為現代戰場“最后一千米”補給難題的關鍵解決方案,實現了多維能力突破,其技術代差優勢正在重構信息化戰場的戰勤保障體系。
工業巡檢作為現代安全生產體系的核心保障環節,正面臨復雜工業場景帶來的技術性挑戰。在具有高危險性(高壓、劇毒介質)、強干擾性(電磁輻射、多源噪聲)和多重約束性(密閉管道、三維異構空間)的極端作業環境中,傳統人工巡檢存在人員傷亡風險指數級攀升,而常規無人機系統受限于環境適應性缺陷(抗干擾閾值不足、機動能力受限),應用效能呈現顯著邊際遞減。在此背景下,特種無人機系統通過突破性技術創新構建多維能力矩陣:基于強魯棒軟/硬件優化設計的抗外源擾動平臺,集成數據驅動深度強化學習的自主檢測、識別、決策系統;搭載多源傳感器融合感知定位模塊,實現室內外、陸空模態無縫切換;電力設施仿生棲降充電功能,實現高效作業。該技術體系使高危環境檢測效率提升,誤檢率下降,可顯著提升整體安全管理效率和應急響應速度,成功構建了全天候、全地形、全要素的智能巡檢新范式。
特殊環境資源勘探正面臨傳統手段的范式性局限。在高山冰川(平均海拔5000 m)、極端干旱沙漠(年降水量50 mm)及極地凍土(年均溫-30 ℃)等不可及區域,面對嚴寒、酷熱、高塵、低壓等極端氣候條件,傳統勘探設備故障率顯著上升,單次作業成本遠超常規環境。針對此瓶頸,跨域特種無人機系統旨在憑借多模態環境適應能力實現技術突破,基于仿生變體機構設計多種介質下運動模態集成,實現大氣、陸地與水域無縫模態切換。配備高光譜成像儀、合成孔徑雷達與多波束測深系統等感知增強體系,通過粒子群優化等智能集群算法實現多機任務分配,構建起“空 ? 陸 ? 水”異構數據融合網絡。較傳統勘探方式效率得到有效提升,降低了人力風險成本,為全球氣候變化建模與戰略性礦產預測提供了顛覆性數據基底。
環境測繪與監測領域正經歷由跨域無人機技術驅動的技術創新。傳統監測手段在空間分辨率與時間連續性方面存在顯著缺陷,導致眾多生態突變事件未能實現預警。針對這一技術困局,特種無人機系統憑借自身環境適應性與立體機動能力深入被測環境內部獲取原始數據或圖像,構建“空天地海”一體化感知網絡,基于數字孿生技術構建高分辨率三維環境模型,融合衛星遙感數據與地面傳感網絡信息,建立生態預警機制,使極端氣候預測、污染溯源準確率提升,實現了監測維度的革命性突破,推動全球環境治理進入“預測 ? 干預 ? 驗證”的智能閉環新紀元。
在重大災害應急響應領域,無人機系統正逐步發展為多模態應急救援體系的核心技術載體。特種無人機實時捕獲風險區域可見光影像、熱輻射分布圖譜及環境參數動態變化數據,為指揮決策系統提供多維度態勢感知信息,顯著提升災情研判的時效性與準確性。基于遙測數據建立厘米級精度的災損評估模型,系統可生成三維數字孿生場景,為指揮中樞提供具備空間拓撲關系的災害態勢圖。這種立體化數據支撐機制有效解決了傳統人工勘查存在的視野盲區與時效滯后問題,使資源配置策略具備動態優化特征。
基于深度強化學習的智能無人機正在重塑傳統應急響應范式。通過邊緣計算節點實現多源數據融合分析,系統可自主識別受困人員熱源信號、評估建筑結構風險等級,并生成多目標優化的救援路徑方案。無人機集群所具備的動態任務分配能力,在余震監測、物資投送與次生災害預警等并發任務中展現出卓越的協同效能。隨著第五代移動通信(5G)與衛星遙測技術的深度融合,未來無人機應急系統將向全域感知、自主決策方向持續演進,構建新型“空天地”一體化應急救援體系,顯著提升現代應急救援體系的時空響應效能。
特種無人機技術在現代化城市消防救援體系中展現出顯著的技術優勢。模塊化設計的滅火無人機系統展現出獨特的技術特性,其配備的高壓霧化噴射裝置與精確制導系統,可對常規消防裝備難以觸及的建筑高危區域實施定點滅火作業。通過建立與地面消防水炮的協同作戰機制,無人機可實施火源定位與滅火路徑規劃,大幅降低消防救援人員暴露于高危環境的概率。特別的,在森林生態系統與工業火災復合場景下,無人機群組通過構建空中滅火劑傳輸網絡,能夠形成早期火勢隔離帶,為傳統消防力量爭取關鍵時間窗口,實現災害損失的有效控制。
基于群體智能算法的無人機集群系統正在重塑傳統滅火作戰模式。通過構建分布式自主決策架構與協同控制平臺,無人機集群可形成具備自組織特性的空中滅火陣列。該技術體系通過動態任務分配算法與三維路徑規劃模型的優化整合,能夠在復雜火場環境中實現快速響應與精準作業。隨著5G技術與邊緣計算平臺的深度集成,未來無人機滅火系統將向智能化、網絡化方向持續演進,為城市公共安全體系提供創新性技術解決方案。
在災后基礎設施受損與通信中斷的情況下,無人機群組通過異構網絡融合技術構建動態通信中繼體系。搭載軟件定義無線電設備與智能反射面技術,可快速構建自適應異構通信網絡。部署具備多協議中繼功能的空中基站,實現信號覆蓋增強;構建無人機中繼鏈路由器,實現遠距離通信接力;通過波束賦形技術優化電磁傳播路徑。由多架無人機組成的通信中繼系統可將信號覆蓋半徑擴展至常規基站的3倍以上,時延控制在150 ms以內,顯著提升受災區域的網絡連通性。未來應急無人機系統將向全頻段通信、自主組網方向演進,構建“空天地”一體化的智能應急響應網絡。
在現代化應急救援體系中,無人機運輸系統正發展成為突破地理限制的關鍵技術手段。無人機搭載模塊化載荷艙與視覺伺服系統,通過三維激光雷達實時掃描地形,結合路徑規劃算法實現厘米級精度的物資定點投放。無人機群組通過分布式任務分配機制,可在30 min內完成半徑5 km范圍內的緊急物資覆蓋,在6級風力環境下仍能保持米級的投送精度,較傳統運輸方式效率提升。
專用醫療特種無人機系統通過建立低空醫療運輸走廊,其配置的恒溫運輸箱體與振動抑制系統,可確保血液制品、疫苗等溫敏物資在運輸過程中的有效性。系統可將急救藥品轉運時間縮短至地面運輸的1/5。在傷員轉移技術發展方面,當前研究聚焦于無人機重載能力與柔性機械臂的集成創新。無人機可自主識別安全著陸區域,實現精確的傷員轉運,顯著降低轉運過程風險,提高操作響應速度。無人機醫療運輸系統使傷員黃金救治時間窗的利用率提升,術后感染率顯著降低。
特種無人機在軍事國防、應急救援和特種工業等領域應用中,需要在多變環境下的長時機動能力、受限空間敏捷控制能力與廣域場景集群保障能力等方面持續提升。特種無人機技術體系架構如圖1所示,主要包括三大部分:特種平臺技術、智能控制技術以及指揮控制保障技術。
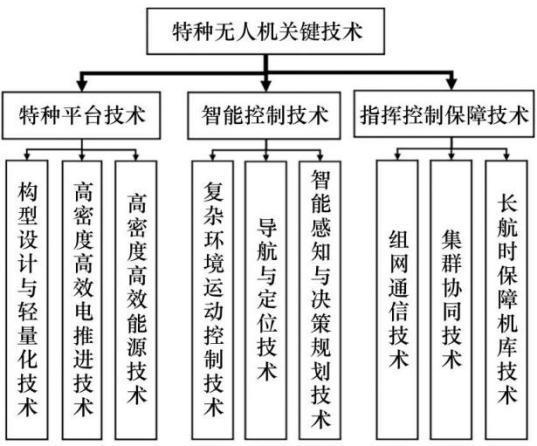
特種平臺技術主要構造特種無人機的軀體,包括機體結構、動力系統、能源供給與任務載荷接口等,奠定了無人機基礎的機動能力、適應能力與載荷集成能力。
智能控制技術主要構造特種無人機的神經系統,包括傳感器系統、控制系統及算法軟件等,決定了無人機應對復雜環境與任務的飛行性能與穩定性、任務執行能力、自主決策與適應能力以及安全可靠性。
指揮控制保障技術主要構造特種無人機的集群網絡,包括指揮控制體系、數據鏈路保障以及保障支持系統;決定了無人機的協同任務能力、應對復雜環境與突發情況能力、通信穩定性與信息交互效率、持續作戰與保障能力。
在構型設計方面,通過采用固定翼、多旋翼、復合翼等傳統布局與變構、跨域組合式等創新結構的融合設計,實現無人機在復雜環境下的多任務復合能力。例如,通過固定翼與多旋翼復合構型適應高速巡航與垂直起降需求,或利用陸空分體式模塊化組合擴展偵察、運輸等功能。輕量化技術則通過碳纖維復合材料、蜂窩夾層結構等新型材料應用,結合一體化成型工藝與空氣動力學優化,在保證結構強度的前提下顯著降低機身重量,提升載荷比與續航能力。二者協同發展,可有效增強無人機在極端氣候、高空長航時、狹小空間作業等場景下的機動能力與環境適應性。
電推進技術具有綠色低碳與分布式布置優勢,是現代航空器以及智能裝備的主要動力發展方向。通過優化電機與動力系統設計,采用高功率密度永磁同步電機、高效螺旋槳與矢量控制算法,結合輕量化結構與先進熱管理技術,實現電能向動能的高效轉化。同時,采用分布式電推進布局與智能功率分配策略,可顯著增強復雜氣流環境下的飛行穩定性。
特種無人機高密度高效能源技術是支撐其長航時、高載荷作業的核心基礎,主要通過提升能量存儲密度、優化能量轉換效率及創新供能方式實現。該技術聚焦于開發高比能電池(如鋰離子電池、固態電池)、高效燃料電池(如氫氧燃料電池)、燃電混合電推進系統及太陽能系統等。
能量管理系統可以提供電池狀態、充電和放電的反饋信息,負責無人機的能源分配和優化利用。通過實時監測飛行狀態和能源狀態,智能調整能源策略與行動模態,實現能量的最優分配,延長飛行作業時間并確保電池安全可靠運行。
運動控制技術是實現無人機穩定飛行與精準操控的核心底層技術,主要通過姿態控制、位置控制及軌跡跟蹤等模塊實現。該技術基于慣性測量單元(IMU)、全球導航衛星系統(GNSS)等多源傳感器數據融合,結合經典PID(比例 ? 積分 ? 微分)控制、預測控制、魯棒控制、自抗擾控制等算法實時調整飛行姿態,確保無人機在風擾、負載變化等動態條件下保持六自由度穩定與精準跟蹤軌跡。
此外,主動容錯控制對于提高系統安全冗余不可或缺。在系統發生故障后,通過診斷機制獲得故障信息,并據此在線調整系統相關參數,重構相應控制律,以實現故障后的安全停止、降落、返航等動作。
導航與定位技術是實現特種無人機在復雜環境中精準作業的核心支撐,通過多源傳感器融合與智能算法協同,整合GNSS、IMU、激光雷達、視覺相機等多模態數據,結合卡爾曼濾波、粒子濾波等算法進行動態誤差修正,確保在電磁干擾、GPS拒止等極端條件下仍保持厘米級定位精度。例如,地形匹配與景象匹配技術實現隱蔽導航,實時建圖與定位技術實現動態避障與拒止環境導航等。
智能感知與決策規劃技術通過多模態傳感器融合、環境建模與智能算法協同構建特種無人機自主決策、目標識別與跟蹤以及高效的信息處理能力,是實現復雜環境自主作業的關鍵核心。通過神經網絡模型提升環境特征識別(如建筑裂縫分析)與目標監測能力,結合邊緣計算實現資源受限平臺的輕量化部署。在決策規劃層面,基于強化學習與模型預測控制(MPC)算法,結合實時環境信息動態生成最優行為與軌跡。在集群協同作業時,通過中心或分布式協同控制,實現多機任務分配與軌跡協調。
特種無人機組網通信技術是實現多機協同作業與遠程控制的核心支撐,可通過自組織網絡、動態路由協議及抗干擾技術構建高可靠通信體系。該技術采用 Mesh 網絡架構實現多機間去中心化通信,支持在地下、峽谷等GPS拒止區域通過中繼節點擴展通信范圍。當通信設施失效時,無人機既可以充當通信中繼站,又可以充當異構網絡的一員,能夠根據無線通信網絡的即時需求,實現靈活配置,迅速恢復系統通信功能。基于自組織網絡進行異構集群之間的跨域通信,構建分布式動態拓撲網絡,能滿足海空跨域協同通信抗干擾、高帶寬和低延遲的數據實時傳輸需求。例如“潛艇 ? 水下無人航行器 ? 無人機”子母式協同作戰系統、歐盟 Grex 項目、海上無人系統研究OCEAN 2020項目、法國Action項目等。
為應對廣域復雜任務需求,采用同構或異構無人集群,通過自組織網絡、智能決策與分布式控制實現集群的自主協同。該技術基于多智能體系統理論,采用一致性算法、強化學習等智能策略,構建動態任務分配與軌跡協調機制。例如,在軍事滲透任務中,無人機集群可通過“蜂群”自組織網絡實時共享戰場態勢,基于強化學習算法動態調整攻擊目標優先級;在應急救援場景中,多機通過信息素算法自組織形成搜索網格,實現高效地探索任務分工與并行建圖。
長時保障機庫技術是支撐特種無人機在極端環境下實現長時間連續作業、機動部署的關鍵基礎設施技術,其核心在于構建智能化、自主化的無人機運維體系。通過集成環境控制、自動釋放與回收、能源補給及智能監控系統,實現無人機集群的全天候部署與快速響應。機庫采用充電式(無線或接觸式)或換電式(取下電池充電后再裝上)對無人機進行電能補給,保障其工作的效率以及可持續性,同時機庫具有堅固的結構,以抵御外部環境對無人機的影響,并配備自動調節內部溫度和濕度功能,從而確保無人機及其組件在存儲期間維持最佳狀態。
為促進特種無人機技術與裝備高質量發展,需加強頂層設計,堅持戰略與應用需求引領,統籌規劃制定目標,發揮國家和行業力量攻克關鍵技術以實現裝備體系發展;加強平臺建設,聯合各方構建深度融合創新平臺,突破壁壘推動多領域裝備高質量持續發展;加強人才培養,圍繞學科融合特征,結合多學科體系強化交叉型人才作用,支持理論與人才隊伍建設,從而推動特種無人機有力服務于國防建設和社會經濟發展。
(一)拓展任務場景,研究低成本、高機動、長續航、變構跨域等新型特種無人機平臺
聚焦未來規模化與跨場景應用的迫切需求,著力推動小型化、低成本且具有變構跨域特性的無人機技術創新。旨在契合多元任務場景對無人機的嚴苛要求,使其在城市作戰、荒野資源勘探、海洋環境監測、山區緊急救援等多領域發揮關鍵作用,為各行業智能化、高效化發展筑牢堅實技術根基,拓展特種無人機應用新境界。
在特種無人機的實際應用中,鑒于諸多受限空間環境下穩定飛行并靈活機動的實際需求,全力發展以學習算法為核心依托的控制技術,具備極強的魯棒性,能有效應對各類復雜干擾與不確定性,同時高度保障飛行安全,賦予無人機在受限空間內敏捷自如飛行的卓越能力,從而極大地拓展特種無人機的作業適應性與任務執行效能。
特種無人機在未知環境自主機動作業始終是亟待攻克的關鍵難題,為此,著力發展基于大模型的智能自主控制技術。借助大模型強大的數據處理與分析能力,使特種無人機能夠快速感知并理解復雜未知環境,精準決策并靈活機動地執行任務,有效提升其在復雜多變場景下的自主性與適應性,為特種無人機的智能化作業開辟新路徑。
針對特種無人機應用場景普遍面臨衛星導航定位拒止這一特殊且極具挑戰性的條件,應積極致力于研發多源定位無縫自主融合技術,整合諸如慣性導航、視覺導航、激光雷達定位等多種定位手段,使特種無人機在衛星信號缺失的環境下,仍可憑借該技術精準確定自身位置與姿態,保障任務的順利推進,增強其在復雜環境下的適應性與可靠性。
特種無人機面對非通視及跨域任務的嚴苛需求,積極探索創新之路,大力發展將有線通信與無線通信予以深度結合的高可靠移動通信技術。在城市峽谷、山地叢林等非通視場景,以及從陸地到海洋、從低空到室內的跨域作業里,此項技術可確保無人機與控制端穩定、高效通信,支撐特種無人機復雜任務的順利實施。

